Основным результатом проекта "Аэропагляд", конечно, является сам факт успешного осуществления всех этапов: проектирование зонда, подготовка к запуску, осуществление запуска, функционирование (с переменным успехом) всех электронных блоков зонда, удачное приземление зонда, его нахождение и получение фотографий. Тут особо говорить нечего -- мы действительно успешно провели первый запуск.
Но после запуска наступает время анализа полученных данных, а также тех ошибок, которые были сделаны при осуществлении проекта. Начнём с результатов.
1). Нами было получено 418 фотографий с момента старта и до момента посадки зонда (41 фото до старта, когда фотоаппарат был включен, и 387 фото после приземления, пока мы не нашли зонд и не выключили фотоаппарат). Точное число "удачных" фотографий (без "смаза" и "пересвета") я указать не могу, но это несколько десятков фото на разных высотах.
2). Первая фотография "вне земли" была получена в 13ч 27м 43с GMT+2 (по часам фотоаппарата, которые были синхронизированы с точным временем), последняя перед приземлением -- в 16ч 13м 02с GMT+2, т.е. общее время полёта составило 9919 с, или 165,3 минуты, или 2ч 45м 19с (тут и далее точность по времени +/- 15 с). На основе просмотра фотографий был установлен момент времени, когда оболочка лопнула (зонд начал "кувыркаться"): в 15ч 04м 37с GMT+2, т.е. через 5814 с (96,9 минуты или 1ч 36м 54с) после старта зонд достиг наивысшей точки полёта. Спуск занял 4105 с (68,4 минуты или 1ч 08м 25с).
3). Между 13ч 45м 42с GMT+2 (т.е. через 18 минут после старта, высота 6556 м) и 16ч 07м 03с (за 5м 45с до приземления, высота 954 м) GMT+2 информации с трекера нету... Последний раз перед до момента спуска зонд вышел на связь по GSM-каналу на высоте 3,5 км -- неожиданно высоко, мы не ожидпли этого. Потом связь пропала, и через минуту трекер, как и положено, начал записывать данные на карту памяти. Но достигнув высоты 6,5 км он это делать почему-то перестал. Данные снова появились только начиная с высоты 1 км, когда зонд спускался. Что было причиной сбоя при логировании данных мы стали выяснять.
Ниже показан график зависимости максимальной высоты подъёма зондаот времени с момента старта при условии не разрушения оболочки (по формулам из статьи "МОЖНО ЛИ УЛЕТЕТЬ В КОСМОС НА ВОЗДУШНОМ ШАРЕ?").
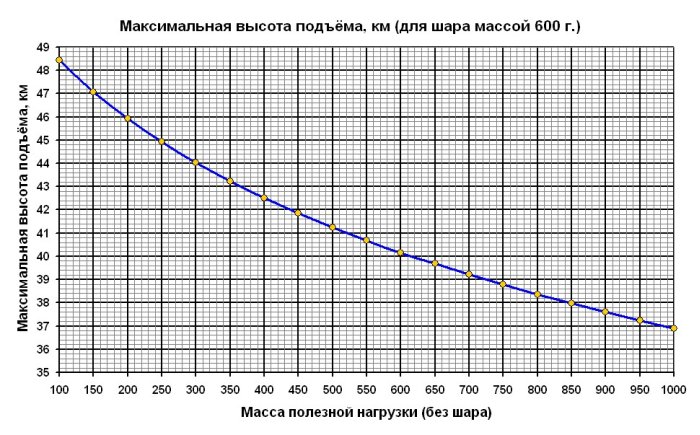
Из графика видно, что наш зонд (масса 550 грамм) имеет теоретический "потолок зависания" в 41 км -- выше он подняться не может. Если оболочка достигнет этой высоты и не разрушится, то зонд будет летать долгое время (ночью, при снижении темпеатуры, зонд снизит высоту), пока не улетучится нужное количество газа из оболочки. Этот "потолок" ещё больше лимитируется прочностью оболочки -- её "потолок лопания" равен 31,5 км, на которой она должна разрушиться. Наиболее вероятная высота разрушения нашей оболочки (из спецификации на неё) -- 26-28 км. Этот график даёт понять, что как бы мы не нагрузили оболочку (она может поднять не более 1,2 кг), он всё равно достигнет высоты лопания, и не достигнет высоты "зависания", правда до высоты лопания зонд будет добираться долго -- ранее приводился этот график, продублируем его снова:

Теперь посмотрим на данные с GPS-трекера, которые мы получили. Итак, зависимость высоты оболочки от времени для стартового участка траектории:

Этот участок, как было сказано выше, охватывает высоты от ~160 м до 6,5 км. Причём можно выделить две "фазы" -- от старта и до 3,5 км и от 3,5 км и до 6,5 км. Обе фазы подъёма представляются в виде прямых (причём зависимость "высота-время" линейная от старта до максимальной высоты подъёма -- за счёт постоянства силы Архимеда!), но с немного разным наклоном. Обе фазы можно аппроксимировать прямыми, формулы которых указаны на графиках. Коэффициенты при переменной "t" -- это скорость подъёма зонда (в м/с). Как в видно, до высоты 3,5 км по данным трекера зонд поднимался со скоростью 5,8 м/с, а выше 3,5 км -- 6,1 м/с. Что же произошло в точке пересечения прямых и почему точки равспределены вдоль них не равномерно? До 1600 м зонд "ловил" GSM-связь и передавал данные о высоте каждые 5 с (есть два участка, когда, видимо, зонд не смог "словить" GSM-сеть сразу). Потом зонд потерял связь и стал раз в 30 с логировать данные на карту памяти. Но неожиданно для нас он вышел на связь ещё раз -- с высоты 3,5 км (это точка обозначена на графика как "выброс"). Видно, что переданные данные сильно отличаются от закона изменения остальных величин и не ложатся на прямую. Видимо, трекер занизил высоту на 200 м при переходе из режима логирования в режим передачи данных. Тем не менее, совершенно не понятно, почему в течении 180 с (с 580-й до 760-й секунды с момента старта) этой "зоны молчания" трекер сделал лишь одно измерение, а затем стал продолжать их делать регулярно раз в 30 с и логировать данные на карту памяти. При этом, после "зоны молчания" характер закона подъёма зонда изменился, хоть и не сильно -- скорость "возросла" на 0,3 м/с. Было ли это возрастание реальным или просто ошибкой измерений -- мы уже не узнаем. Но полученные данные позволяют оценить ту высоту, которой достиг зонд.
Т.к. из анализа фотографий мы знали время разрушения оболочки (а это происходит на максимальной высоте полёта) с ошибкой не более 15 с, то ошибка по высоте за счёт этой ошибки по времени будет не более 500 м, т.к. скорость падения зонда в начальный момент составляет примерно 30-40 м/с (по данным моделирования). Теперь из предыдущего рисунка выписываем зависимости высоты зонда от времени для двух "фаз" взлёта зонда:
h1(м) = 5,8073*t(c) + 111,89 м, (*)
h2(м) = 6,1351*t(c) - 55,908 м, (**)
Из (*) получаем, что через 5814 с после старта зонд лопнул на высоте 33876 м, а по (**) -- на высоте 35614 м. Разность этих значений -- 1738 м -- есть удвоенная ошибка определения высоты, вызванная ошибками измерений (наличие двух "фаз" взлёта). Итоговая средняя оценочная максимальная высота зонда с учётом ошибок получается равой 34,750 +/- 1 км. Скажем так -- получилось "многовато", т.к. эта величина больше "потолка лопания" нашего зонда. Конечно, нам мог попасться "прочный" экземпляр оболочки, но эта оценка всё равно слишком грубая, т.к. мы знаем о высоте зонда как функции времени только до 6,5 км...
Тем не менее, полученная информация очень важна для дальнейшего анализа -- из неё следовало, что скорость подъёма зонда была около 6 м/с.
Почти за 6 минут до приземления GPS-трекер снова вышел на связь. В этот момент он был на высоте 954 м. Из графика снижения зонда видно, что до высоты 700 м были перебои с GSM-связью, а ниже связь "ловилась" устойчиво.

Участок снижения на последних километрах, в общем случае, тоже практически линейный, т.к. плотность воздуха изменяется незначительно (от высоты 1 км до 0 км всего на 5% -- см. рисунок ниже). Ниже приведена зависимость плотности воздуха от высоты для стандартной атмосферы по данным ГОСТ 4401-81.

Аппроксимируя участок спуска, можно определить скорость снижения зонда на уровне "моря" -- около 2,7 м/с, что хорошо согласуется с нашими тестовыми измерениями. К сожалению, эта информация не позволяет определить максимальную высоту "с обратной стороны" общего трека полёта, т.е. со стороны сруска, т.к. после разрушения оболочки зависимость высоты зонда от времени нелинейная.

Нелинейность эта вызвана, конечно, нелинейностью изменения плотности атмосферы с высотой (см. график выше). Если продлить аппроксимирующую прямую назад по времени, то она пересечёт трек в точке "В", а вовсе не в точке "С" наибольшего подъёма. Но полученное значение скорости спуска зонда вблизи поверхности Земли -- 2,7 м/с -- очень важно, т.к. мы заранее не могли оценить эту аеличину точно, т.к. не знали, какой массы остатки оболочки будут висеть на нитке, привязанной к зонду, на сколько эта нитка деформирует парашют и как это скажется на скорости спуска. Полученное значение скорости спуска говорит о том, что влияние не очень значительно.
Зная скорость подъёма, скорость спуска и массу зонда, можно вполне точно смоделировать трек его полёта -- особенно зависимость высоты зонда от времени (используя сервисы "CUSF Balloon Burst Calculator" и "CU Spaceflight - Landing Prediction"). На скорость спуска и подъёма не влияют боковые скорости ветра, поэтому моделирование можно проводить для любого дня. Если взять полученные скорости подъёма и спуска, и задать разные значения достигнутой зондом высоты (34 км, 31,5 км, 29 км и 28 км), и наложить на данные с участка спуска зонда, полученные с трекера, то получим следующие графики:

Как видно, если бы зонд спусался с 34 км, то приземлился бы он значительно позже 9880-й секунды с момента запуска. Это же касается и вариантов падения с 31,5 км и 29 км. А вот модельный трек для падения с 28 км проходит ниже измеренных значений -- значит, зонд падал с высоты между 28 и 29 км. Учитывая ошибку по времени, получаем, что действительная максимальная высота подъёма нашего зонда была 28,5 +/- 0,5 км. Это значение наиболее вероятное.
Также нужно отметить, что первая точка после повтороного выхода трекера на связь при спуске является "выбросом", не ложащимся на общую закономерность -- также, как в "зоне молчания" при взлёте...
4). Не менее интересны данные об изменении температуры элементов фотоаппарата, которые проливают и некоторый свет на вопрос об некорректной работе GPS-трекера. На графике ниже показаны изменения температуры ПЗС-матрицы ("CCD temperature") и батарейного отсека ("Battary temperature") "зондового" фотоаппарата.

Первое, на что обращается внимание, это то, что температура фотоаппарата, а значит и внутри коробки, к моменту достижения наибольшей высоты не упала ниже нуля, хотя на высоте 29 км атмосфера имеет температуру порядка -50о С. Внутри коробки в этот момент было +10о С. Такая особенность связана с тем, что коробка остывает не мгновенно, а постепенно -- ранее описывались наши "морозильные" испытания, и было видно, что характерное время остывания (снижение температуры в е = 2,72... раза) при нормальном атмосферном давлении равно около 20 минут. Вторым фактором является то, что на высоте 29 км давление 73 раза меньше, чем у поверхности Земли, а это резко снижает охлаждение за счёт конвекции. Кроме этого, и ПЗС-матрица, и литиевые батарейки сами себя греют -- за счёт потребления электроэнергии и химических реакций. Пропуская участо небольшого увеличения температуры (его мы расмотрим ниже), обратимся к участку резкого снижения температуры. В промежуток времени со 130-й по 150-ю минуты с момента запуска температура батарейного отсека упала ниже -10о С. Более точно измерить её мы не можем, т.к. встроенные термодатчики фотоаппарата не фиксируют более низкие температуры. Но длительность этого участка невелика -- около 15 минут. Температура ПЗС-матрицы не опускалась ниже -8о С, значит и батарейный отсек не охлаждался ниже примерно -15о С. Точка максимального "замерзания" приходится на высоты 9-3 км, что на первый взгляд кажется парадоксальным, т.к. на 29 км температура -50о С, а на 9-3 км повышается от -43о С до -5о С для стандартной атмосферы (данные ГОСТ предусматривают при этом температуру вблизи поверхности Земли +15о С. В нашем случае было на 10о холоднее, и эту поправку надо вычесть из упомянутых значений, т.к. до 10 км температура падает линейно с высотой. Но на общую картину это не сильно влияет, т.к. всё равно на 29 км как минимум не теплее, чем на 9 км). На момент приземления температура внутри коробки была -2о С. По данным фактической погоды сайта pogoda.by, на момент посадки температура воздуха в Ивацевичах (30 км на северо-восток от Белоозёрска, места посадки) была +3,8о С. После посадки температура внутри коробки начала повышаться, но не остановилась на +4о С, как следовало ожидать -- она повышалась до +20о С (!), пока мы не приехали а и не сняли зонд с карниза. Это могло означать только одно -- наша система подогрева работала "как не в себя" не только в течении полёта, но и после приземления! Она не позволила охладиться коробке до -50о С на большой высоте (зонд не успел остыть), и подогревала её до нашего приезда. На первый взгляд, система отработала на отлично.
Почему же коробка начала "замораживаться" только при спуске, когда до земли оставалось несколько километров? В качестве предположения можно сказать следующее. Пока зонд поднимался, поток воздуха был направлен из коробки наружу (т.к. давление снаружи падало, а коробка была не герметичной -- имелся небольшой зазор вокруг объектива фотоаппарата, выходящего через отверстие в коробке наружу). Это служило препятствием проникновению холодного внешнего воздуха. Кроме того, давление падало, и скорость "заморозки" уменьшалась. После разрушения оболочки ситуация изменилась -- внешнее давление росло, и воздух стал проникать внутрь зонда, охлаждая его. Инертность охлаждения и разреженность воздуха на большой высоте привели к тому, что максимум охлаждения приходится не на максимальные высоты, а на участок холодного воздуха с достаточно большой плотностью -- поэтому максимальное охлаждение пришлось на 9-3 км.
Теперь обратимся к несколько станному повышению температуры коробки в промежуток времени 90-100 минуты с момента старта. Сразу следует отметить, что "цена деления" термодатчиков фотоаппарата составляет 1о С, а точность их того же порядка (стандартная точность недорогих термодатчиков). Поэтому повышение температуры на 2о С могло быть простой ошибкой измерения. Но даже в этом случае наличие "полки" в изменении температуры с 50 по 100-ю минуты говорит о том, что зонд перестал охлаждаться, т.е. вышел на стабильный режим. Наложим график изменения температуры батарейного отсека на график изменения температуры с высотой стандартной ГОСТовой атмосферы.

Сразу бросается в глаза неожиданное поведение ГОСТовой кривой -- с 11 км и до 20 км температура не изменяется, достигая наименьшего значения -56о С, а выше 20 км начинает повышаться! Это известный факт -- взаимодействие УФ-излучения с озоном, максимум концентрации которого приходится на 30 км, приводит к выделению тепла -- это подогревает атмосферу выше тропопаузы (11-20 км). Именно это и служит признаком начала стратосферы. Как видно из графиков, ход изменения температур повторяют друг друнга, но со сдвигом по оси абсцисс (это эквивалентно сдвигу по времени, т.е. температура зонда запаздывает от изменения температуры атмосферы). Начало "высотного" минимума температуры батарейного отсека приходится на окончание стропопаузы. По времени этот сдвиг эквивалентен 1350 с или 22,5 минутам -- удивительное совпадение с характерным временем остывания коробки. Или не совпадение? Говоря осторожно, можно предположить, что наш зонд успел не только отреагировать на наступление тропопаузы, но и уловить возрастание температуры в стратосфере. Однако, свою "лепту" в эти процессы мог внести блок подогрева GPS-трекера. Тем не менее, результаты интересные.
5). Макс (biz_0n) при создании прошивки фотоаппарата заложил возможность логирования не только температуры фотоаппарата, но и его напряжения питания. Этим мы пользовались при тестах, и, конечно, при полёте. На графике ниже изображено изменение напряжения питания со временем.

Кривая, в принципе, повтрояет зависимость изменения температуры, что не удивительно -- с понижением температуры батарея "садится". После приземления за счёт подогрева напряжение поднялось снова. До уровня напряжения 2,6 В (70% заряда батареи), а тем более 2,5 В (50% заряда) оставалось ещё долго -- фотоаппарат очень успешно перенёс полёт в "ближний космос".
Теперь обратимся к фотографиям. Их мы получили достаточно много, но, к сожалению, доля "брака" велика. Почему фотографии получились качеством хуже, чем должны были быть по замыслам? Какая именно причина ухудшения качества? Скорее всего в этом повинна слишком большая выдержка (из опыта зарубежных коллег и наших тестов мы знали, что выдержка должна быть порядка 1/800 с "в обшем случае", но пейзаж постоянно менялся, в связи с чем фотоаппарат мог неверно замерять нужное значение экспозиуии). Ещё, фотоаппарат такого класса не способен выдавать очень качественные снимки (наличие "мыла" и шумов). Кроме того, ISO было непонятного значения. Ранее писалось о том, что могло быть причиной сбоя в выставлении ISO -- Лёша (Deimos) перед установкой фотоаппарата в зонд сделал синхро-снимок экрана монитора ПК с часами, чтобы по этому снимку и данным о времени сохранения кадра на карту памяти фотоаппарата определить поправку часов фотоаппарата. Это правильное решение, т.к. в случае "замерзания" встроенной батарейки фотоаппарата значение времени могло обнулиться, и мы могли бы говорить о привязки времени снимков к точному времени, по которому запускали зонд, весьма условно, а это внесло бы ещё большую долю предположений в анализ высоты подъёма зонда. Ошибка заключалась в том, что Лёша не сказал о своих действиях Максу (biz_0n), который отвечал за настройку фотоаппарата, а тот не проверил настройки перед установкой фотоаппарата в зонд, т.к. не предполагал таких действий от участников запуска. Если Лёша выставил автоматическое определение ISO, то это и внесло искажения в кадры. Однако это так и осталось тайной. Винить никого нет смысла -- просто нужно чётко контролировать все действия всей команды и делать предстартовую подготовку по списку, что радикально снизит вероятность "недокументированных особенностей" системы.
Ещё одним неприятным моментом было то, что Макс (biz_0n) доделывал финальную версию прошивки фотоаппарата практически в последнюю ночь перед запуском -- т.к. мы решили не высчитывать интервал между кадрами заранее, а сделать этот процесс автоматически. При таком раскладе фотоаппарат должен был оценивать объём свободного места на карте памяти, которое осталось, и после этого делать кадр. Т.к. время полёта изначально было задано неверно (масса зонда поменялась перед самым стартом, т.к. был удалён блок пиротехнического отделения хонда от оболочки шарика), интервалы съёмки были больше, чем планировалось. Ниже приведён график изменения интервалов съёмки между кадрами от времени полёта.

Сначала интервал составлял 26-27 с, а к моменту приземления уменьшился ло 22 с. Дальнейшее уменьшение интервала связано как с малодетальный пейзажем (объектив был обращён к тёмной стене), так и с выходом прошивки за рамки расчётного времени, что привело к тому, что кадры начали производиться подряд, с минимальной задержкой. Мы получили 418 кадров за полёт, а могли получить в 1,5 раза больше -- если бы вовремя изменили значение времени полёта. Конечно, что-то менять в последние часы перед запуском -- последнее дело. Это справедливо и в космонавтике, и в нащем деле запуска зондов.
Оставался самый интригующий вопрос -- почему GPS-трекер работал так некорректно и большая часть данные по высоте потеряна? Почти сразу мы стали винить в этом систему обогрева, которая работали "как не в себя". Действительно, почти 4 Вт тепла выдавали резистивные нагреватели. Грелся только аккумулятор трекера -- нагреватели (параллельно спаянные резисторы) были размещены прямо на нём. Много или мало такого количества тепла для полёта? При наземных "морозильных" тестах мы не видели особого изменения температуры в коробке от работы 2 Вт нагревателя. Этот факт был нами растолкован как то, что и 4 Вт будет нормально -- лишь бы аккумулятор трекера не замёрз, иначе мы не узнаем координаты посадки. Видимо, мы перестарались...
15 декабря 2010 г., почти через месяц после старта, мы провели некоторые тесты. Основное предположение для тестов -- аккумулятор перегрелся от системы подогрева (при превышении температуры аккумулятора выше определённого значения он отключается встроенным контроллером -- это система защиты литий-ионных аккумуляторов). Как показали тесты, это предположение почти 100% верное. На практике трекер отключился через 17 мунут полёта. Поместив трекер в пеноплатовый кубик с той же системой подогрева (питание было от внешнего блока питания), мы начали нагревание, следя за температурой по термопаре. График нагрева приведён ниже.

Честно говоря, я не ожидал, что градиент температуры от области термодатчика (на аккумуляторе) до противоположной стороны трекера будет маленьким -- мы хотели выждать 20 минут. За это время трекер нагрелся до 140о С (электроника, скорее всего, не выше 100 градусов), и связь трекера с WEB-сервером была потеряна. Мы немного перестарались -- подплавили немного пластиковую вставку в трекере. После остывания и презапуска трекера он снова заработал. Условия нагрева при полёте были менее жёсткими, но всё равно единственным на данный момент реальным обяъснением некорректной работы GPS-трекера является его перегрев. Стало понятно, что в следующем запуске будем делать "умную" систему подогрева -- с контролем температуры.
После успешного проекта "Аэрапогляд" мы стали готовиться к новому, более "технологичному" в плане аппаратуры и системы получения фотографий и видео. Рабочее название проекта -- "Yy" (рабочее название предыдущего проекта было "Zz", так что мы просто продолжили следование аналогии и под "Yy" не скрывается какого-либо словосочетания).
Lupus.